功能需求
移动机器人配备的单线激光雷达,只能探测到雷达所在平面的障碍物信息,为了减小视野盲区,需要融合深度相机信息进行避障,实现对不同高度范围障碍物进行感知,进一步结合障碍物信息进行避障;
设计思路
实现方式
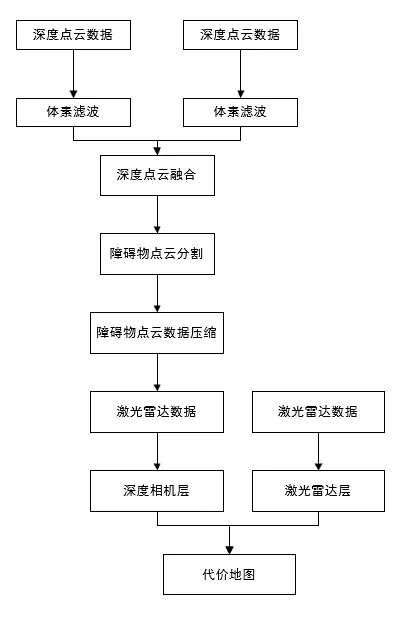
基于rtab-map实现
体素滤波
点云融合
障碍物点云分割
深度点云转单线激光雷达数据
代价地图配置:添加深度相机障碍物层 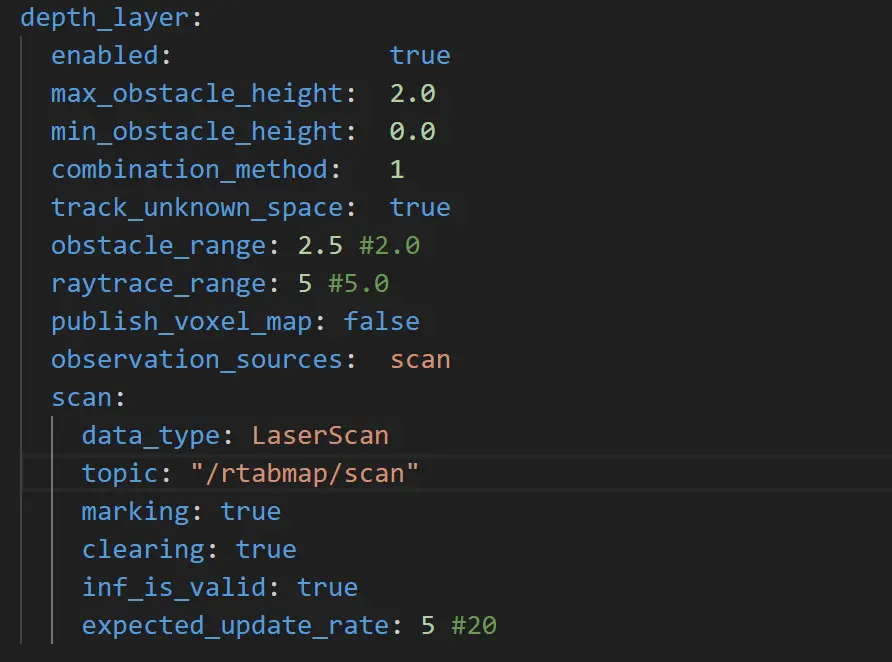
基于PCL实现
性能调优
深度点云处理核心问题还是数据量,单个深度相机数据带宽可以达到20MB/S;
1、使用nodelet通过零复制指针传递数据,降低数据传输量;
2、通过体素滤波预处理降低后续处理数据量;